Actualités autour du I3XO :
a partagé une réalisation
avec :

-
Xylem Analytics France SAS

WTW®
YSI®
YSI®
Sontek®
YSI®
WTW®
YSI®
YSI®
YSI®
YSI®
YSI®
YSI®
YSI®
SewerDev®
IADYS®
BIRDZ®
HYDREKA®
FLYABILITY®
AMS ALLIANCE
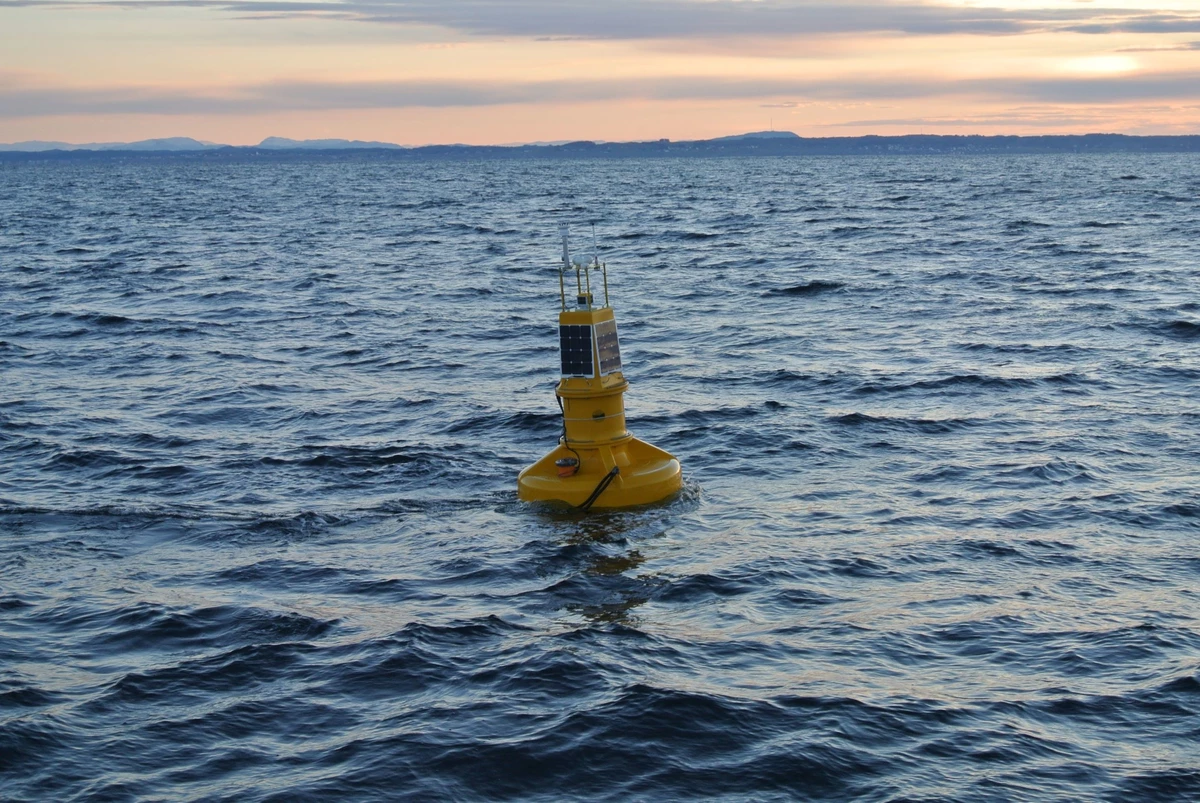
AANDERAA®
HERLI HYGIENE®
DEEP TREKKER®
microLAN®
aquams®
HERLI HYGIENE®